舵机反向器

网络数传电台

差分定位模块

LHFK V-1.0

这款高精度智能舵机反向器,是专为解决舵机输出方向适配问题打造的核心控制组件。它以精准反向算法为核心,融合高精度测量与实时响应技术,可快速实现 PWM 信号反向输出。
这款无线数传电台是专为高效远距离数据传输场景打造的紧凑型通信模块,融合 RISC-V 架构算力与双模式无线通信技术,以高性能、长距离、易部署为核心优势。
这款差分定位模块是专为高精度定位场景打造的核心感知组件,融合五大卫星系统多频点接收技术与先进差分算法,以全场景信号覆盖、厘米级定位精度、高动态响应能力为核心优势。
飞行控制器
这款高精度智能飞控,是专为无人机飞行控制场景打造的核心指挥中枢。它深度集成多系统差分定位技术与高动态响应能力,以精准定位、稳定控制、快速启动为核心亮点。


























详细介绍
核心算法
精准反向算法(output = 2000 - input + 1000)
输入捕获分辨率
1 μs
信号响应方式
硬件级定时器捕获与输出
输入电压范围
3.3V / 5V
典型功耗
< 50 mW
工作温度范围
-20℃ ~ 85℃
核心功能
PWM信号精准反向输出、微秒级脉宽测量
适配系统
3.3V 嵌入式系统、5V 工业级设备
详细介绍
处理器
RISC-V 160 MHz 单核
通信模式
Wi-Fi、ESP-NOW(双模切换)
传输距离
视距最高1公里(ESP-NOW模式)
兼容协议
Mavlink协议
接口类型
GH1.25-4P 标准接口
模块重量
27 g
传输特性
串口透明传输、开机即通
详细介绍
卫星系统支持
GPS L1/L2、GLONASS G1/G2、B2、GALILEO BDS B1/B2、GALILEO E1/E5b、QZSS L1/L2
RTK 定位精度
水平:0.01 m + 1 ppm CEP
垂直:0.01 m + 1 ppm CEP
单点定位精度
水平:1.5m CEP
垂直:1.5m CEP
速度精度
0.05m/s
航向角精度
静态:0.4 deg(基线1米)
动态:0.3 deg
时间精度(1PPS)
RMS 30ns,99%情况下≤60ns
启动时间
冷启动:24s
热启动:2s
详细介绍
核心处理器
STM32H743 Cortex-M7,最高频率 480 MHz,支持双精度浮点运算
感知系统组件
1. 陀螺仪/加速度计:ADIS16470(车规级,工作温度-40℃~105℃)
2. 磁罗盘:RM3100(工业级,抗磁干扰)
3. 惯性测量单元(IMU):三重冗余,支持温度补偿
接口配置
1. PWM 输出:8 路(驱动电机/执行器)
2. 总线接口:CAN 总线(适配工业级外设)
3. 功能接口:GPS 接口、I2C 接口(接温湿度/气压传感器)、双 TELEM 接口(数据回传/指令下发)
固件兼容性
完美兼容 ArduPilot 开源固件,支持多机型(多旋翼、固定翼、直升机)
供电规格
工作电压范围:4.5~5.4 V(兼容 3S~4S 锂电池,无需额外电压转换)
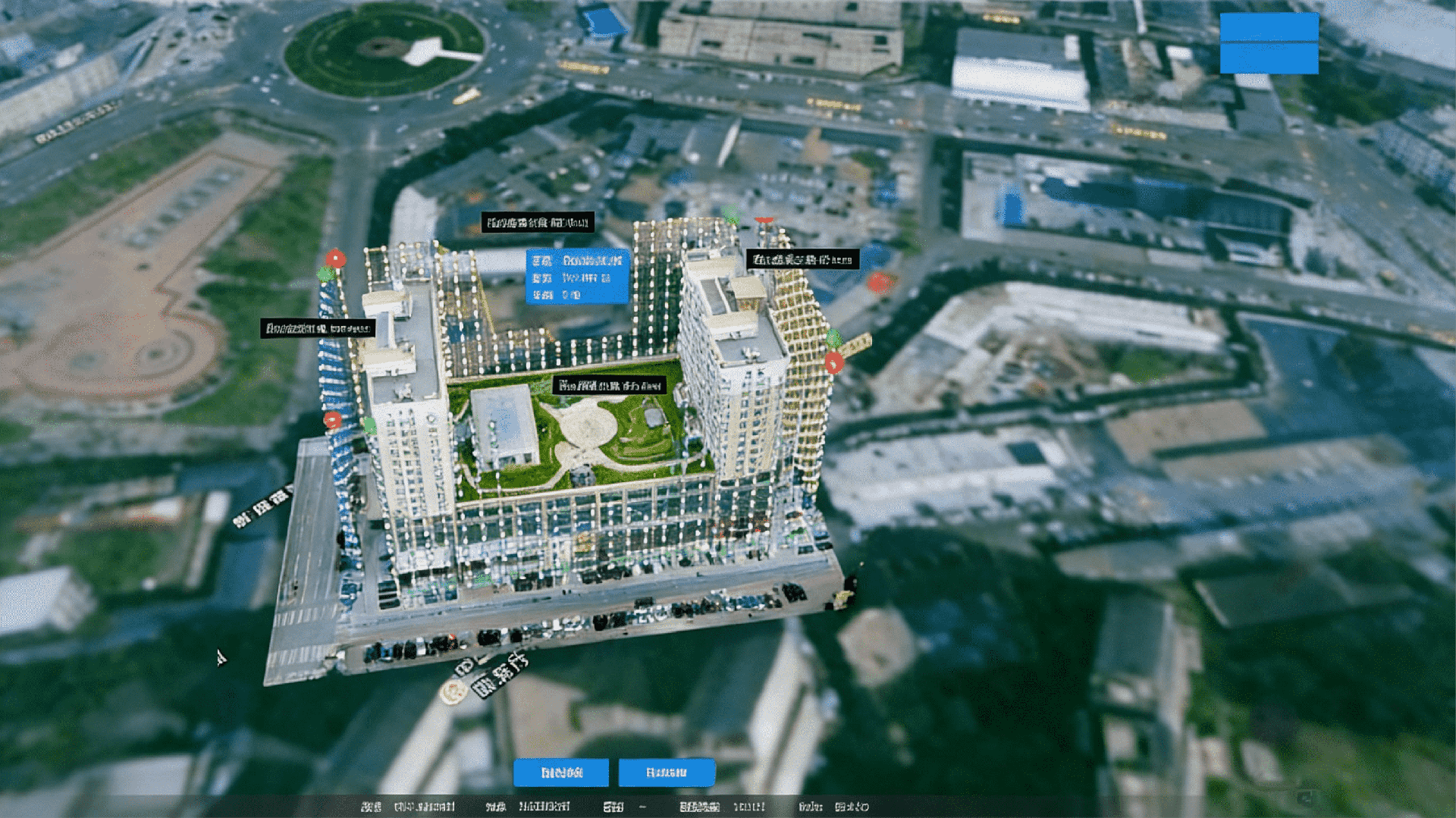
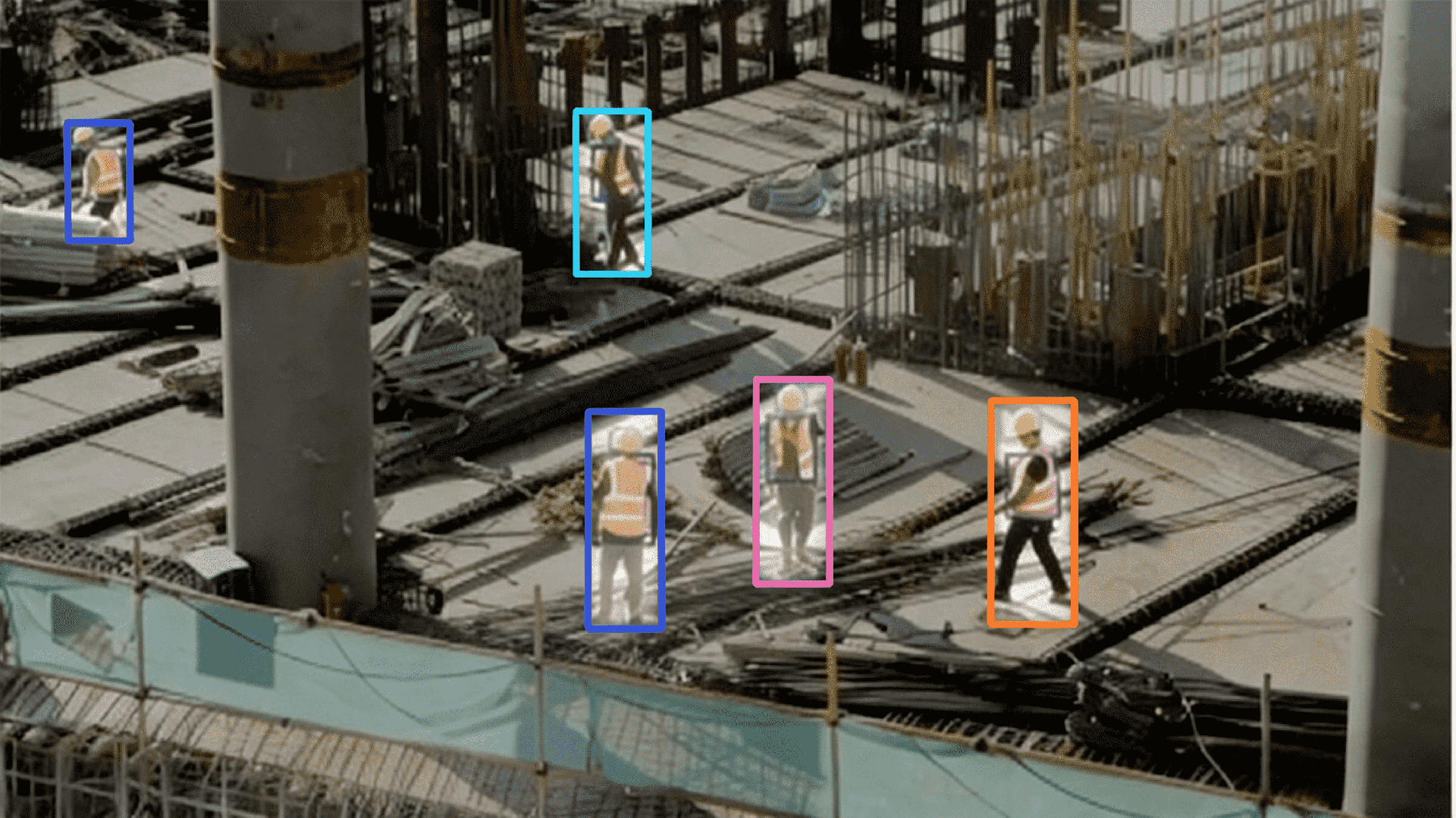
使用场景