履带无人车

全地形,高承载
30°
最大爬坡角度
70mm
最大可跨越障碍物高度
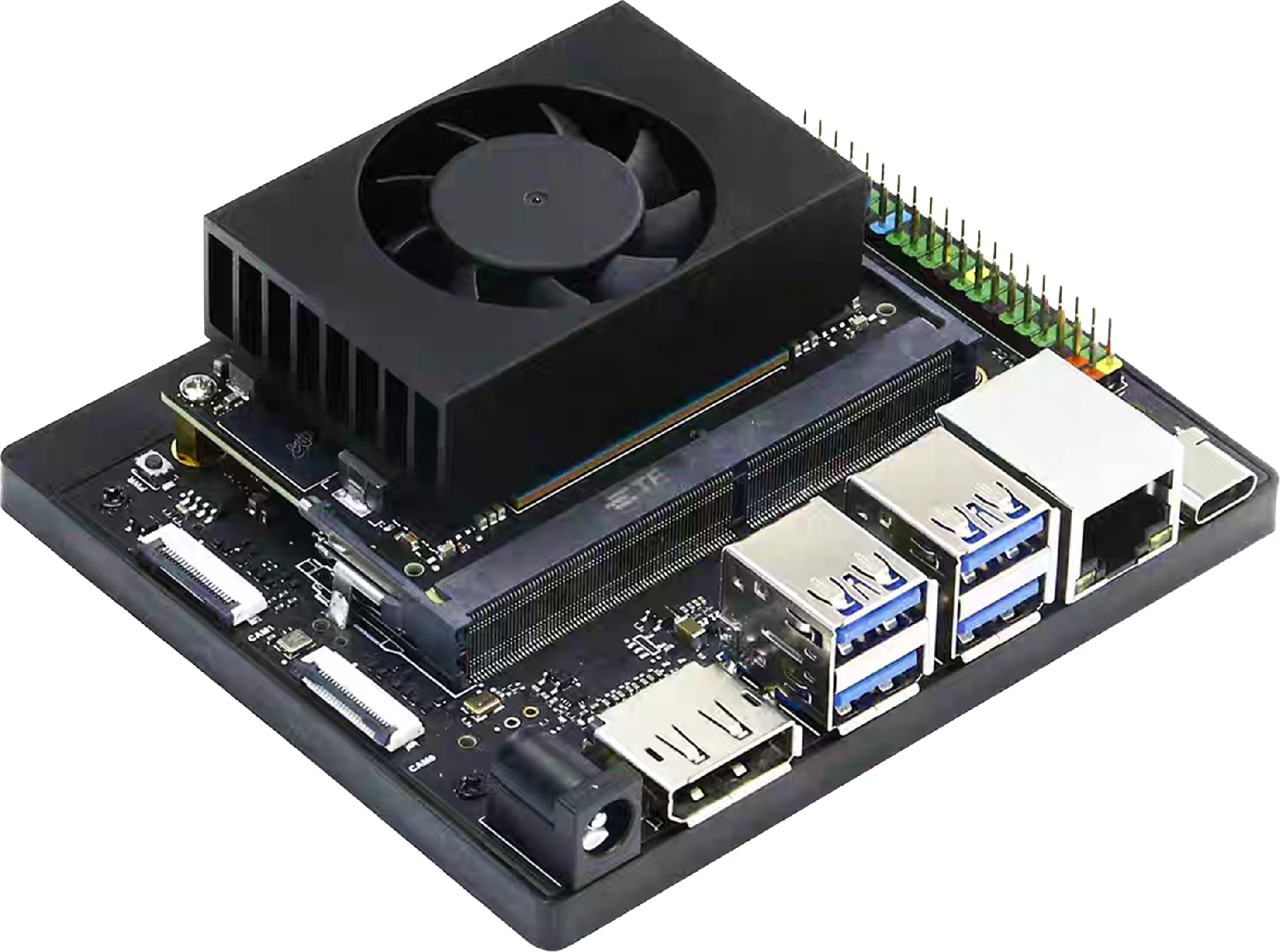
以 Jetson NX 为智能核心,搭载 D435i、ZED 2i 及思岚 S2 智能设备,构建高效感知与控制体系。驱动系统配备 2 台 JGB37-550 直流减速电机,内置行星减速器(减速比 30),通过驱动器独立控制,可在保证转速的同时提供充足扭矩。
产品展示视频
详细参数
整体尺寸
600*400
输入电压
24v
空机重量(包含电池)
20KG
电机
JGB37-550
设计最大时速
50km/h
最大负载重量
10KG
空载行驶时间
2h
驱动
直流有刷电机驱动板
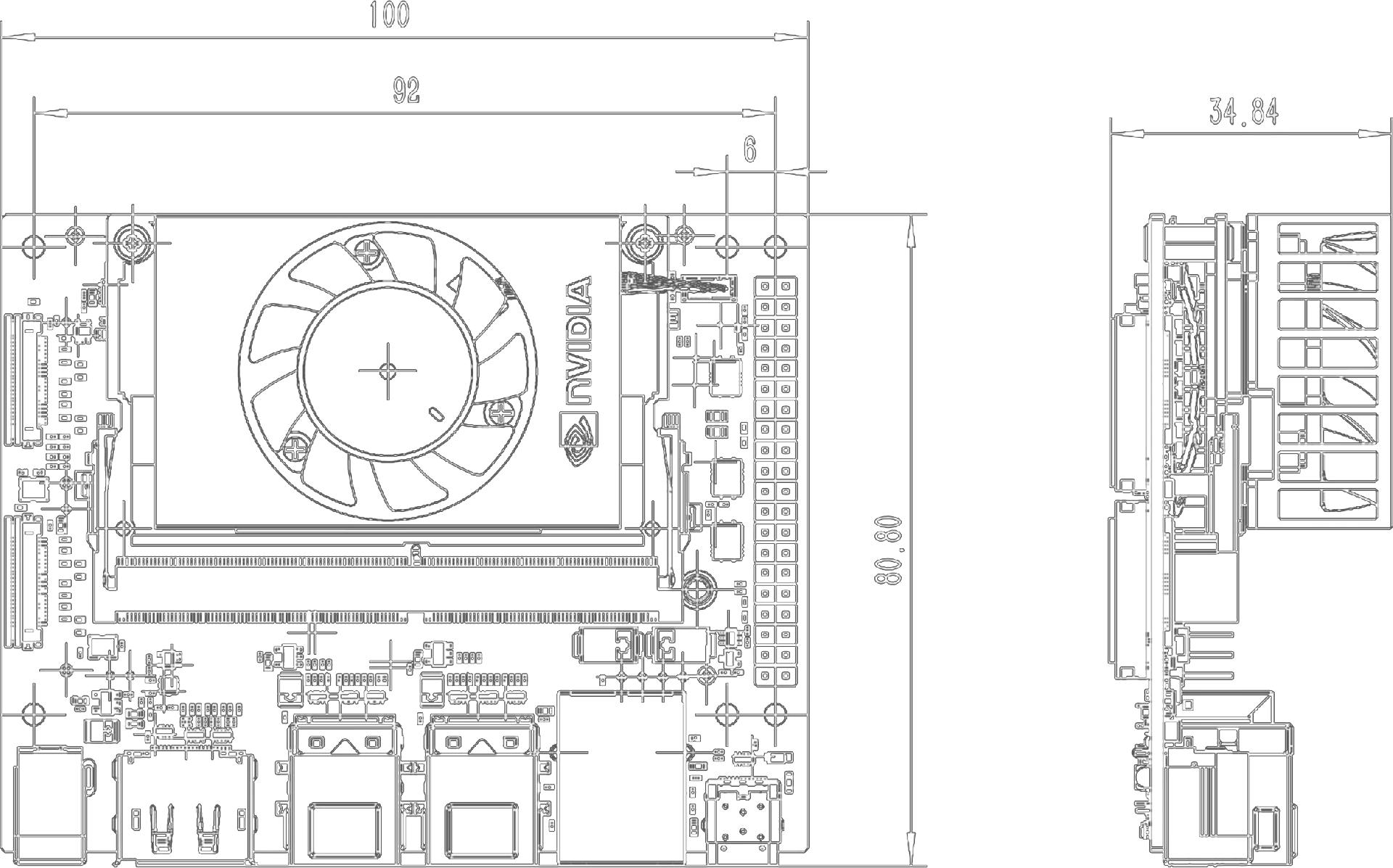
Jetson
NX
GPU
GPU最大频率
AI算力
CPU最大频率
DL 加速器
内存
功率
存储
CPU
SPEC int rate
USB(核心板)
摄像头接口
视频编码
视频解码
视频输出接口
数据传输接口
M.2 Key接口
NVIDIA Ampere architecture 1024 CUDA Cores 32 Tensor Cores
1173 MHz
157 TOPS (满载) 78 TOPS (密集)
2.0 GHz
2×NVIDIA v2
16GB 128-bit LPDDR5 102.4 GB/s
10W/15W/25W/40W
支持外部NVMe
神经立体连贯感应
167
3个USB 3.2 第二代(10 Gbps) 3个USB 2.0接口
2组CSI接口(29pin, 0.5mm间距)
1×6K60|1×2560×1440|H.265 6×1080p60|H.265 12×1080p30|H.265
1×8K30|H.265 2×4K60|H.265 4×4K30|H.265 5×1080p60|H.2651×1080p30|H.265
DP接口
Type-C接口
M.2 Key+M.2 Key M.2
附件信息




| 深度技术 | Active IR Stereo |
| RGB相机 | 最高 1920×1080@30 fps |
| RGB FOV | 69.4° × 42.5° × 77°(±3°) |
| 深度相机 | 最高 1280×720 @ 90 fps |
| 深度视场 FOV | 87°±3° × 58°±1° × 95°±3° |
| 集成 | 6-轴IMU传感器 |
| 相机尺寸 | 90×25×25 mm |
| 深度最大范围 | ≈10 m |
| 最小深度距离 | 0.105 m |
| 激光波长 | 905nm |
| 量程(@100KIX) | 40m@10%反射率 70m@80%反射率 |
| FOV | 水平360°,竖直-7°~52° |
| 点云输出 | 200,000点/秒(可配置第一回波) |
| 点云帧率 | 10HZ(典型值) |
| 数据同步方式 | IEEE 1588-2008(PTP V2),GPS |
| IMU | 内置型号:ICM40609 |
| 防护级别 | IP67 |
| Wi-Fi标准 | 2.4 GHz |
| 理论物理速率 | 最高 150 Mbps |
| 室外通信距离 | 100-200 m |
| 通信延迟 | 5-20 ms |
| RGB视场角 | 80°×50° |
| 单目分辨率 | 1920×1200 |
| 帧速率 | 60fps |
| RGB传感器 | 全局快门 |
| 深度精度 | <1%> |
| 惯性测量单元 | 工业级IMU |
| 最小深度 | 10-15cm |
| 接口 | GMSL2 |
使用场景

特种安防执勤

野外物资运输

矿井隧道巡检

危险环境处置